- اولین ایده خودروهای خودران
- سطوح تصمیم گیری خودروهای اتوماتیک
- سیستم های ارتباطی V2x
- پلتفرم رانندگي خودگردان (ابري)
- جمع بندی
به طور عموم ،خودروهای خودران به وسایل نقلیه ای اطلاق می شود که وظیفه ترابری مسافران و سرنشینان خودرو را بدون نیاز به راننده و کنترل کننده دائمی برعهده دارند.
اولین ایده خودروهای خودران
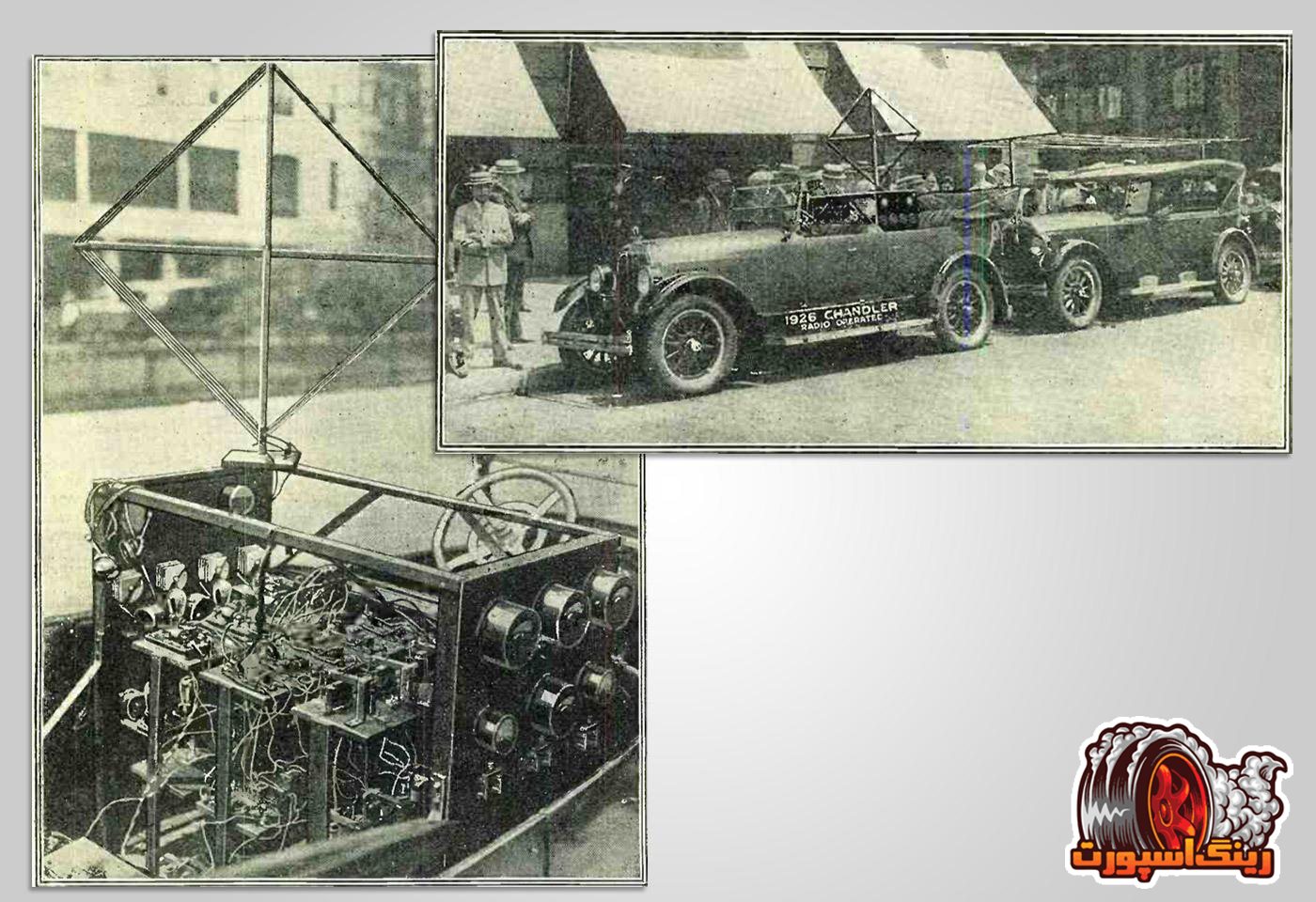
اولین جرقه تولید این نوع خودروها در سال ۱۹۲۵ توسط کمپانی رادیویی هودینا زده شد.این خودرو خودران که با نام «اعجوبه آمریکایی» شناخته می شد بوسیله امواج رادیویی و به کمک آنتن توسط فردی که در ماشین پشتی ،مستقر بود هدایت میشد.بعد از اعجوبه آمریکایی شرکت هودینا در سال ۱۹۲۶،از محصول دیگر خود با نام شبح اتوماتیک رو نمایی کرد.
اما اولین تلاش جدی درعرصه خودروهای تمام اتوماتیک به دهه ۸۰ میلادی برمی گردد .زمانی که برندهای معتبری مثل مرسدس بنز،جنرال موتور،بوش،نیسان و… تحقیقات گسترده خود را برای تولید این نوع خودروها را آغاز کردند که چشم انداز وسیعی از تحولات اقتصادی ،رفاهی ،محیطی و زیرساختهای ترافیکی را در جوامع مختلف انسانی می گشاید.
داده های آماری حول خودروهای خودران
طبق آمار ایالات متحده آمریکا، حدود نود درصد از تلفات جاده ای بعلت اشتباهات انسانی حادث میشود.خودروهای خودران با ایجاد شبکه تبادلاتی گسترده مابین دیگر خودروها،جاده ها،پایگاه داده های ترافیکی و تحلیل شرایط محیطی ،بسیار از نواقص انسانی را به طور مستقیم و غیرمستقیم پوشش میدهند.لذا استفاده از این خودروها درآینده می تواند جان بسیاری از رانندگان و سرنشینان خودرو را نجات دهد.
محققان تخمین زده اند که اتومبیلهای بدون راننده میتواند تا نیمه قرن، تا ۹۲درصد تلفات رانندگی را کاهش دهند. این بدان معنی است که با استفاده از تعداد تلفات در سال ۲۰۱۳ به عنوان پایه،ماشینهای خودران میتواند سالانه ۲۹۷۷۴ نفر را نجات دهد. در ایالات متحده از نزدیک به ۳۰۰۰۰۰ مرگ و میر در طول یک دهه جلوگیری میشود و ۱,۵ میلیون نفر در هر نیم قرن زنده می مانند.
از طرفی آسایش رفاهی که خودروهای تمام اتوماتیک فراهم می آورند می توانند ،زمان مرده بخش اعظمی از آمدوشدهای شهری را کاهش داده و به زمان مفید تبدیل کنند و از دشواری هایی و خستگیهای حاصله از رانندگی بکاهند.
وجود شبکه های گسترده ارتباطی که با عنوان V2x نام برده میشود خودروهای اتوماتیک را به فناوری ای مجهز می کند که احتمال ایجاد و بروز ترافیکهای طولانی و سنگین را کاهش میدهد.بطوریکه خودرانها با تعامل متقابل با دیگر خودروها،تراکم وترافیک جاده ای را کنترل کرده وبا اتخاذ تصمیمات تعاملی از بروز تصادفات گسترده جلوگیری می کنند.
در خودروهای خودران با توجه به اینکه خودرو از شتاب گرفتنها ،ترمزهای بی مورد و رفتارهای غلط رانندگی مصون باقی می ماند،انتظار داریم مصرف این نسل خودروها به میزان قابل توجهی کاهش یابد.به عنوان مثال، در بزرگراهها، وسایل نقلیه خودکار میتوانند با یکدیگر ارتباط برقرار کنند و به صورت یک گروه رانندگی کنند. این میتواند کل مصرف انرژی حمل ونقل جاده را کاهش دهد، زیرا وقتی وسایل نقلیه بافاصلهای کم نسبت به هم حرکت میکنند و با کمترین مقاومت هوا مواجه میشوند.
ظهور خودروهای خودران در قالب وسیع صنعتی و انبوه سازی این نسل جدید ماشینها ،در وهله اول توسعه و هماهنگ سازی تجهیزات شهری را می طلبد .بهبود و توسعه علائم راهنمایی و رانندگی و استاندارسازی شریانهای ارتباطی درون و برون شهری از جمله اقداماتی است که در زیرساخت های شهری تاثیر بسزایی دارد.
پیشنهاد میشود برای اطلاع از تازه ترین قیمت های خودرو امروز کلیک نمایید.
خودروهای خودران به علت عدم نیاز به راننده ،به طور مداوم قابل بهربرداری و حرکت هستند همین امر موجب میشود که از نیاز مبرم به توقف گاه ها(پارکینگ) که در کلانشهرها بشدت احساس می گردد،کاسته شود. بسیاری از شهرها سالانه مقدار زیادی از درآمد خود را از طریق اجاره ی پارکینگ و سایر جریمه های مربوط به پارکینگ کسب میکنند. به عنوان مثال سانفرانسیسکو به تنهایی سالانه حدود ۱۳۲ میلیون دلار از طریق پارکینگها درآمدزایی میکند.
در آمریکا خودروها ۹۵ % زمان خود را در محدوده ی شهری در حالت پارک میگذرانند. داشتن ماشینی که بتواند فرد را به مقصد برساند و به خانه بازگردد نیاز به داشتن پارکینگ را کاهش میدهد. خودروهای خودران نیاز به مجوز پارکینگ و سایر هزینه های مربوط به آن را کاهش میدهد.از دیگر مزایا خودروهای اتوماتیک،کاهش زمان تلف شده مسافران وسایل نقلیه عمومی میباشد.چرا که وجود چنین وسایلی،دقت زمان بندی و سرعت خدمات رسانی به شهروندان را به شکل قابل توجهی افزایش خواهد داد.
اما شاید اصلی ترین و مهم ترین هدف ساخت خودروهای خودران که ذهن مهندسین و طراحان را به خود معطوف داشته،میزان ایمنی وکاهش تلفات انسانی در جاده هاست.در یک خودرو اتوماتیک که اگر آنرا یک نمونه ایده آل در نظر بگیریم بایستی تمام احتمالات در رانندگی از شرایط جوی،فرهنگ رانندگی منطقه،موانع نابهنگام احتمالی(مثلا اشیا یا عابران) تا خرابی ها و مشکلات احتمالی جاده در نظر گرفته شود

چراکه اگر همه ی جوانب بطور کامل پوشش دهی نشود و اصولی منطقی ای که ذهن انسان بطور طبیعی از آنها تبعیت می کند ،در پردازنده های خودروهای خودران مورد توجه قرار نگیرد ، احتمال تصادف و افزایش تلفات جانی مشخصا بطرز چشمگیری افزایش می یابد.
تولید خودروهای خودران و تمام اتوماتیک در آینده ودیعه ایست که اگر محقق شود می تواند ،سالیانه جان میلیون انسان را در حوادث و تصادفات رانندگی نجات دهد که این امر مستلزم ایجاد یک پایگاه وسیع داده ای اعم از شرایط توپولوژیک منطقه ای ،علائم راهنمایی و رانندگی،اطلاعات ترافیکی،نقشه های دقیق و دائما بروز و اطلاعات مسیر دیگر خودروهای حاضر در جاده می باشد.همه این اطلاعات و داده ها باید در تمامی مناطق ،توسط خودرو تجزیه و تحلیل شده و به هسته مرکزی (که وظیفه تصمیم گیری را به عهده دارد) ارسال شود.
اگر مایل به دانستن تاریحچه خودرو های هیبرید هستید، از بخش دوم مقاله الکترومبیل دیدن فرمایید.
سطوح تصمیم گیری خودروهای اتوماتیک
سطح ۱:این سطح با عنوان دستیار راننده پیشرفته(ADAS)میتواند کنترل فرمان،ترمز و شتاب خودرو را به دست بگیرد و در صورت بروز اشتباه از طرف راننده با دخالت خود از تصادف جلوگیری کند.این سطح تصمیم گیری همچنین شامل سیستم های کمک ترافیکی و سیستم نگه دارنده ی بین خطوط نیز میشود.
سطح ۲: در این سطح ،خودرو علاوه بر ویژگی های سطح یک،توانایی تغییر اتوماتیک خط مسیر و سیستم کمک پارک را دارا می باشد که به خودرو ابتکار عمل بیشتر در تصمیمات میدهد.
سطح ۳:این سطح با نام سیستم رانندگی خودکار (ADS) تمام وظایف رانندگی تحت شرایط مشخص، مثل پارک کردن را انجام می دهد. در این شرایط راننده انسانی باید آماده به دست گرفتن کنترل وسیله بوده و لازم است که همچنان راننده اصلی خودرو بماند.
سطح ۴:در سطح ۴،خودرو بطور تمام اتوماتیک، توانایی به عهده گرفتن وظایف رانندگی را دارا میباشد و تا درصد بالایی قابل اطمینان است اما همچنان عناصر ارتباطی راننده و خودرو مثل فرمان،پدالها و دنده جهت بدست گرفتن کنترل وسیله نقلیه توسط راننده وجود دارد.
سطح ۵:در این سطح خودرو مانند یک تاکسی مجازی عمل میکند و تمام وظایف رانندگی را در تمام شرایط انجام میدهد. انسانهایی که سوار آن میشوند مسافر حساب میشوند و هرگز از آنها انتظار نمیرود که کنترل خودرو را به دست بگیرند. به بیان ساده تر اگر مشکلی پیش بیاید خود خودرو آن را برطرف میکند .در این سطح، کنترل خودرو توسط انسان ضروری نیست. سطح پنج دارای اتوماسیون کامل است که نیازی به پدال، فرمان و کنترل توسط انسان نیست.
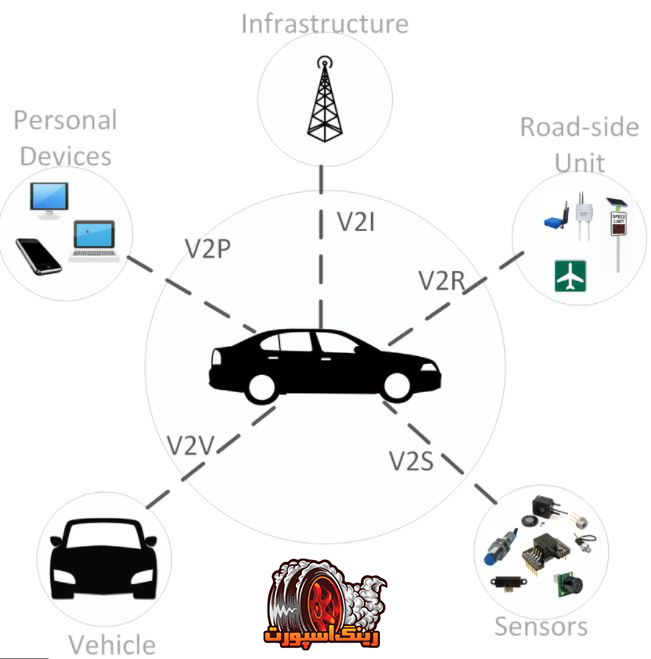
سیستم های ارتباطی V2x
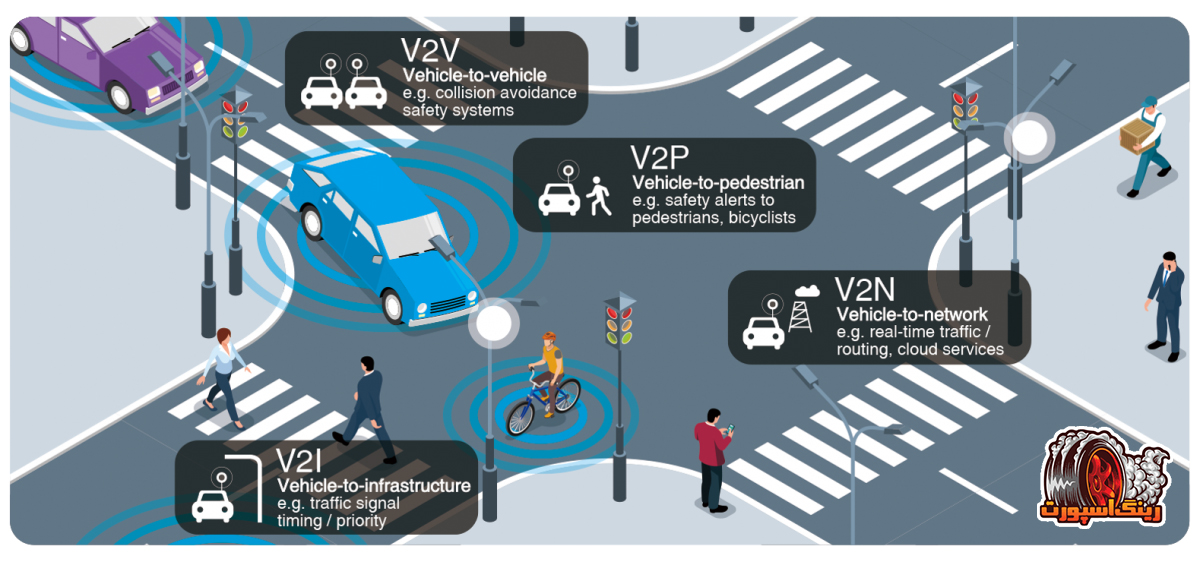
به طور کل پروتکل های v2x که در دو بستر شبکه بی سیم و سلولی گسترش یافته اند وظیفه جمع آوری اطلاعات و طبقه بندی آنها جهت ارسال به هسته مرکزی خودرو و اخذ تصمیمات مناسب را به عهده دارند.پروتکلهای ارتباطی v2x در خودرانها به ترتیب ذیل می باشد.
| V2I | خودرو زیرساخت ها-vehicle to infrastructure |
| V2P | خودرو به عابر پیاده رو-vehicle to pedestrian |
| V2N | خودرو به شبکه-vehicle to network |
| V2H | خودرو به خانه-vehicle to home |
| V2C | خودرو به رایانه ابری-vehicle to cloud |
| V2V | خودرو به خودرو-vehicle to vehicle |
| V2D | خودرو به وسایل الکترونیکی-vehicle to device |
| V2R | خودرو به جاده-vehicle to road |
ارتباط وسیله نقلیه با V2i
ارتباط کلی خودرو با دستگاه های محیطی ثابت که جمع آوری اطلاعات را انجام میدهد بوسیله زیرساختهای v2i امکان پذیر میشود.در این سیستم ها ارتباطات دو طرفه و یک طرفه ای که مابین خودرو و دستگاه ها برقرار میشود،خودرو را در تصمیم گیریها ،در کنترل و مدیریت ترافیک،بروز رسانی نقشه ها و اطلاعات مربوط به مسیریابی کمک شایانی می کند.این ارتباطات معمولا به وسیله تجهیزات کوتاه برد با سرعت انتقال بالا و یا از طریق سیستم های موجود در ارائه دهندگان تلفن همراه برقرار میشود.
ارتباط وسیله با V2P
ارتباط خودروهای خودران با عابرین پیاده و یا موانع احتمالی مثل سنگ یا شیشه بوسیله سنسورها،دوربین و لیدار انجام میشود.لیدارها علاوه بر تشخیص موانع و ارزیابی جاده کاربردهای گسترده دیگری نیز دارند. لیدارها به جای استفاده از امواج صوتی و رادیویی برای اسکن محیط اطراف، از پالسهای نور لیزر استفاده میکنند. به این ترتیب سیستم لیدار میتواند با سرعت نور محیط اطراف را تصویرکند. نحوه عملکرد این سیستم به صورت زیر است:
· دستگاه لیدار پالسهای لیزر را در همه جهات انتشار میدهد تا این پالسها به یک جسم برخورد کنند.
· به محض برخورد، این پالسها به سیستم لیدار منعکس میشوند.
· سیستم لیدار این پالسهای منعکس شده را دریافت و ثبت میکند.
لیدارها به صورت یک زائده جعبه مانند به سقف خودروها متصل میشود و با ارسال پالس های نوری و ساطع کردن میلیونهای اشعه در ثانیه ،تصویری سه بعدی از محیط اطراف را برای خودرو ترسیم می کنند.لیدارها حتی در تشخیص علائم راهنمایی -رانندگی و تمیزدادن آنها از یک دیگر توانمندند.تنها عیبی که می توان در این دستگاه های نوظهور ذکر کرد عدم توانایی به نمایش آوردن سریع و بدون تأخیر سرعت وسایل نقلیه اطراف است که بعلت همین نقص از رادارها در خودرو استفاده میشود.
دوربین نیز در تشخیص عابرین نقش مهمی ایفا می کند.علاوه بر آن حضور دوربین در دریافت اطلاعات تابلوها و بازشناسی علایم راهنمایی رانندگی بسیار حیاتی است.دوربین خودروهای خودران بکمک اعمال فیلترهای Gaussian و بهبود لبه های تصویر ،الگوریتم های لازم جهت بازشناسی اطلاعات تابلوها را انجام میدهند.
پیشنهاد میشود برای مشاهده اخبار روز خودرو از صفحه اخبار داخلی خودرو دیدن فرمایید.
الگوریتم تشخیص علایم راهنمایی رانندگی
ارتباط وسیله با v2r
این ارتباط به وسیله سیگنال ها که از کناره ی جاده ارسال میشود برقرار می گردد.واحدهای ارتباطی کنار جاده ممکن است با فاصله یک کیلومتر یا کمتر در کنارهم قرار بگیرند تا در شرایط ترافیکی سنگین،قادر به انتقال سریع اطلاعات باشند.از طرفی این واحدها با فاصله زمانی معین یک پیام حاوی سرعت مجاز را پخش می کنند و هرگونه محدودیت جغرافیایی و جاده ای را به اطلاع خودروها میرساند.
خودروها خود نیز با تجهیزاتی مثل رادارها و سیستم موقعیت یاب جهانی(GPS) ،در کسب اطلاعات جاده ای ،اهتمام می ورزند. سیستم های دستیار راننده پیشرفته نیازمند تعداد زیادی رادارها هستند که نقش مهمی در عملکرد کلی خودروهای بدون راننده دارد. در رادار به جای استفاده از امواج صوتی یا نور، از امواج رادیویی برای اندازه گیری فاصله استفاده میشود. این حسگر میتواند سرعت، فاصله، زاویه وحالت اجسام را تشخیص دهد.
حسگرهای رادار سبکتر از دیگر حسگرها میباشند و میتوانند تقریباً در همه شرایط محیطی کار کنند.رادارها همچنین در شناسایی نقاط کور،جلوگیری از برخورد با حاشیه جاده و دیگر ماشینها،کاربرد اساسی دارند.جی پی اس یا سیستم موقعیت یاب جهانی نیز ،در مسیریابی خودروهای خودران و بازیابی اطلاعات جاده ای می تواند مفید واقع شود.
پلتفرم رانندگي خودگردان (ابري)
تمام اطلاعات به دست آمده از v2xها،لیدار ها،رادار ها،سنسور ها و پایگاه های داده ای،در پلتفرم خودگردان ذخیره شده و بوسیله الگوریتم های برنامه نویسی شده،برای ایجاد تصمیم گیریهای منطقی مورد استفاده قرار میگیرند.پلتفرم خودگردان با کمک الگوریتمها ،تجربیات و ری اکشن های رانندگان انسانی،از انبوه اطلاعات بدست آمده بهره میگیرد و بهترین و بهینه ترین تصمیمات را در مواقعی بحرانی اتخاذ می کند.
عملكردهاي هوش مصنوعی در خودروهاي خودگردان
بر اساس تصميمات اتخاذ شده توسط عامل هوشمند، خودروي خودگردان قادر به تشخيص اشياء در خيابان، داشتن عملكرد در ترافيك آن هم بدون دخالت افراد و ايمن رسيدن به مقصد مورد نظر خود ميباشد. همچنين خودروهاي خودگردان مجهز به سيستم هاي مبتنی بر هوش مصنوعی مثل تشخيص صدا و كلام، كنترل حالت بدن، دنباله روي مسير چشم و ساير سيستم هاي بازبيني رانندگي، راهنماي مجازي و سيستم هاي تشخيص مسير و مكان ميباشند.
اين سيستم هاي كاربردي تنها برخي از سيستم هاي بكار گرفته شده در خودروهاي خودگردان هستند که می توانند در آینده ای نزدیک به عناصر مهمی در توسعه این نوع خودروها تبدیل شوند.رشد فناوری های مربوط به هوش مصنوعی و سیستم های رباتی حسی-کنشی(sensing-acting)که با رویکرد مبتنی بر یادگیری و مدلینگ طراحی میشوند در آینده پیشروی خودروهای خودران، نقش بسزایی ایفا خواهند کرد و می توانند راهگشای بسیار از موانع موجود در ساخت اتوموبیلهای سطح ۵(تمام اتوماتیک)باشند.
جمع بندی
دیر یا زود خودروهای خودران به بدنه اصلی وسایل حمل و نقل شهری تبدیل خواهند شد.اما تولید و انبوه سازی این نوع خودروها همچنان با فراز و نشیبهای فراوانی روبروست.مجهزسازی زیرساخت های شهری،کسب اطمینان عمومی،استاندارسازی جاده ها،ساخت و ایجاد نقشه های بروز و دقیق و همین طور ساخت خودروهای مقرون بصرفه(که عموم مردم توانایی خرید آن را داشته باشند) از جمله موانعی است که در مقابل خودروسازان و طراحان خودروهای خودران دیده میشود.
حصول اطمینان مردم در قبال خودروهای اتوماتیک نیز بسیار حائز اهمیت است. از آنجایی که این خودروها به صورت مستقیم با جان انسانها در ارتباط هستند، هرگونه اخلال در ارتباط بین خودروها میتواند منجر به حوادث جبران ناپذیری شود.لذا کسب اطمینان های لازمه در جهت ایمن سازی اتومبیلهای اتوماتیک از ملزوماتی ست که باید در مسیر پیشرفت و انبوه سازی آنها لحاظ شود.
سوالات متداول
در ادامه سوالاتی که امکان دارد برای شما در رابطه با موضوع آشنایی کامل با اتصالات توپی خودرو بوجود بیاید آماده کردهایم:
سطح اول تصمیمگیری ماشین های خودران را توضیح دهید.
این سطح با عنوان دستیار راننده پیشرفته(ADAS)میتواند کنترل فرمان،ترمز و شتاب خودرو را به دست بگیرد و در صورت بروز اشتباه از طرف راننده با دخالت خود از تصادف جلوگیری کند.این سطح تصمیم گیری همچنین شامل سیستم های کمک ترافیکی و سیستم نگه دارنده ی بین خطوط نیز میشود.
ارتباط وسیله نقلیه با V2i چیست؟
ارتباط کلی خودرو با دستگاه های محیطی ثابت که جمع آوری اطلاعات را انجام میدهد بوسیله زیرساختهای v2i امکان پذیر میشود.در این سیستم ها ارتباطات دو طرفه و یک طرفه ای که مابین خودرو و دستگاه ها برقرار میشود،خودرو را در تصمیم گیریها ،در کنترل و مدیریت ترافیک،بروز رسانی نقشه ها و اطلاعات مربوط به مسیریابی کمک شایانی می کند.این ارتباطات معمولا به وسیله تجهیزات کوتاه برد با سرعت انتقال بالا و یا از طریق سیستم های موجود در ارائه دهندگان تلفن همراه ایجاد میشود.
وظیفه پلتفرم خودگردان در خودروهای اتوماتیک چیست؟
تمام اطلاعات به دست آمده از v2xها،لیدار ها،رادار ها،سنسور ها و پایگاه های داده ای،در پلتفرم خودگردان ذخیره شده و بوسیله الگوریتم های برنامه نویسی شده،برای ایجاد تصمیم گیریهای منطقی مورد استفاده قرار میگیرند.پلتفرم خودگردان با کمک الگوریتمها ،تجربیات و ری اکشن های رانندگان انسانی،از انبوه اطلاعات بدست آمده بهره میگیرد و بهترین و بهینه ترین تصمیمات را در مواقعی بحرانی اتخاذ می کند.
اولین جرقه تولید خودروهای خودران چه زمانی و توسط چه شرکتی زده شد؟
اولین جرقه تولید این نوع خودروها در سال ۱۹۲۵ توسط کمپانی رادیویی هودینا زده شد.